Basic Mobile Robot Arduino
Berbasis Pemrograman IDE Arduino + Interface Python
Judul Buku
: Basic Mobile Robot Arduino Berbasis Pemrograman IDE Arduino + Interface Python
Penyusun
: Mada Sanjaya W.
S. dan Gilang Pratama P. S.
ISBN
: 978-623-6452-72-1
Tahun Terbit
: 2025
Ukuran
: 21 x 29.7 cm
Tebal
: xii+340
Jenis Cover
: Hard Cover
Penerbit
: BOLABOT
Sinopsis
: Buku ini hadir sebagai panduan bagi siapa saja yang ingin memahami dunia robotika berbasis Arduino dan Python, dari konsep dasar hingga penerapan dalam berbagai proyek. Disusun secara sistematis, buku ini mencakup berbagai aspek penting mulai dari pengenalan robotika, sistem elektronika dan mekanika robot, hingga pemrograman dan implementasi proyek berbasis Arduino dan Python. Selain itu, pembaca akan dibimbing dalam memahami berbagai sensor, aktuator, serta teknologi modern seperti speech recognition, komputer vision, kontrol berbasis GUI, hingga integrasi dengan smartphone dan IoT.
Alat Penentu Arah Kiblat dan Waktu Sholat (Q-Bot Ver.3) dibuat oleh
Tim Riset Instrumentasi Jurusan Fisika, Fakultas Sains dan Teknologi,
UIN Sunan Gunung Djati Bandung, berkolaborasi dengan Bolabot Techno
Robotic Institute.
Q-Bot Ver.3 ini berbasis GPS, Digital
Compass dan Mikrokomputer, sehingga alat ini dapat digunakan di berbagai
tempat (portable). Dengan mengolah data Bujur (Longitude) dan Lintang
(Latitude) menggunakan metode Spherical Trigonometry, data Arah Kiblat
dan Waktu Sholat dapat dipresentasikan pada alat ini. System alat ini
juga dilengkapi dengan speaker, sehingga dapat membantu tunanetra untuk
menentukan arah kiblat.
Perkembangan
robotika di masa depan adalah adanya interaksi antara robot dan manusia yang
lebih dinamis yang dikenal sebagai sociable robot (robot sosial). Dr. Cynthia
Breazeal merupakan ilmuwan MIT yang menjadi pionir dalam bidang sociable robot
yang terkenal dengan sociable robot “KISMET” buatannya. Setelah kemunculan
KISMET, beberapa ilmuwan robotika membuat berbagai sociable robot berikutnya
sehingga muncul robot “Leonardo”, robot “EDDIE” dari Jerman, robot “SAYA” dari
Jepang, dan lainnya.
(a)
(b)
(c)
Gambar 1 Sociable robot,
(a) "SyPEHUL", (b) “KISMET”, (c) “EDDIE”
Pada bagian ini akan
dijelaskan konsep sociable robot karya Bolabot Robotic Institute tahun 2017,
yang dinamakan robot “SyPEHUL= System of Physics, Electronics, Humanoid robot,
and machine Learning”
Mekatronika
Sociable Robot
Mekatronika “SyPEHUL” terdiri dari mekatronika alis menggunakan 2 servo,
mekatronika mata menggunakan 2 servo, mekatronika mulut menggunakan 4 servo,
mekatronika telinga menggunakan 2 servo, dan mekatronika leher menggunakan 2
servo.
Desain
Mekatronika Sociable Robot Berbasis Raspberry Pi
Gambar 2 Skema
rangkaian robot sosial 12 DoF
Gambar 2 memperlihatkan skema lengkap dari mekatronika sociable robot
“SyPEHUL” 12 DoF berbasis mikroprosesor raspberry pi.
Desain
Mekanika Bagian-Bagian Sociable Robot
Gambar 3Skema dan realisasi robot “SyPEHUL”
12 DoF
Berikut adalah bagian-bagian kepala
robot “SyPEHUL”
A.Bagian Mekatronika Alis
(a)Kondisi alis saat ekspresi “senyum” dan “datar”
(b)Kondisi alis saat ekspresi “marah”
(c)Kondisi alis saat ekspresi “sedih” dan “kaget”
Gambar 4Bentuk gerak mekatronik bagian alis
robot “SyPEHUL”
Bagian alis
sociable robot terdiri dari dua buah motor servo yang masing-masing menggerakan
bagian alis kiri dan kanan robot. Terdapat tiga variasi kondisi alis robot pada
ekspresi wajah “SyPEHUL” sebagaimana diperlihatkan pada Gambar 4.
B.Bagian Mekatronika Mata
(a)
Mata “SyPEHUL” tampak depan
(b)
Mata “SyPEHUL” tampak belakang
Gambar 5Bentuk gerak mekatronik bagian mata
robot “SyPEHUL”
Gambar 5
memperlihatkan bahwa gerak mata robot dikendalikan oleh dua buah servo. Servo
pertama menggerakan mata robot agar dapat melirik ke kiri dan kanan, sedangkan
motor servo kedua menggerakan mata robot agar dapat melirik keatas dan bawah.
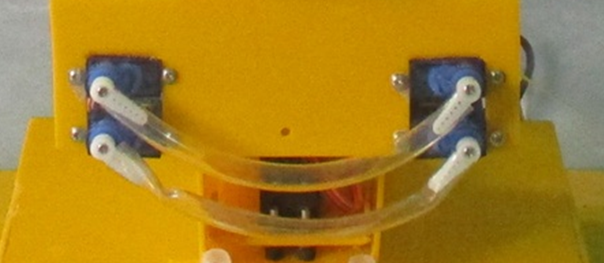
C.Bagian Mekatronika Mulut
Mekatronika mulut
robot “SyPEHUL” terdiri dari 4 buah motor servo, dimana masing-masing bibir
atas dan bawah di kendalikan oleh dua buah motor servo. Variasi bentuk bibir
mulut robot dapat menggambarkan berbagai ekspresi wajah robot seperti senyum,
marah, sedih, kaget, maupun datar.
(a)Kondisi mulut saat ekspresi “senyum”
(b)Kondisi mulut saat ekspresi “marah”
(c)Kondisi mulut saat ekspresi “sedih”
(d)Kondisi mulut saat ekspresi “kaget”
(e)Kondisi mulut saat ekspresi “datar”
Gambar 6Bentuk gerak mekatronik bagian mulut
robot “SyPEHUL”
D.Bagian Mekatronika Telinga
Gambar 7Bentuk mekatronik bagian telinga
robot “SyPEHUL” (tampak belakang)
Bagian telinga
sociable robot terdiri dari dua buah motor servo yang masing-masing menggerakan
bagian telinga kiri dan kanan robot. Telinga robot dapat bergerak keatas dan
bawah yang menunjukkan ekspresi wajah “SyPEHUL” sebagaimana diperlihatkan pada
Gambar 7.
E.Bagian Mekatronika Leher
(a)
(b)
Gambar 8Bentuk mekatronik bagian leher robot
“SyPEHUL”: (a) Servo leher robot gerak horizontal memutar, (b) Servo leher
robot gerak vertikal
Bagian leher sociable robot
terdiri dari dua buah motor servo seperti terlihat pada Gambar 8. Servo
pertama menggerakan leher robot agar dapat beruputar horizontal sehingga
seolah-olah dapat menengok kiri dan kanan. Sedangkan servo kedua berperan untuk
menggerakan leher robot secara vertikal. Fungsi dari bagian leher robot ini
adalah agar robot dapat mengikuti posisi koordinat dari objek yang dilihatnya.